آشنایی با Haptic Feedback و فناوری بازخورد لمسی در دستگاههای همراه
نمایش خبر
| تاریخ : 1399/7/17 نویسنده: نعمت الله کمال فر | ||
| برچسبها : | فناوری لمسی Haptic Technology ، بازخورد لمسی Haptic Feedback ، هپتیک Haptic ، موتور تپتیک اپل Apple Taptic Engine ، جرم چرخان مختلفالمرکز ERM ، موتورهای محرکه طنین خطی LRA | |


Haptic Feedback چیست؟
واژه haptics از کلمه یونانی "haptikos" به معنای "دریافتن یا فهمیدن" نشات گرفته است. اصطلاح "haptic feedback" یا بازخورد لمسی که با عنوان haptics نیز مورد اشاره قرار میگیرد، عبارت است از به کار بردن لرزش، فشار و حرکت برای ایجاد ارتعاش و شبیهسازی حس لامسه برای کاربری که مشغول تعامل با یک دستگاه هوشمند است. البته این تعامل گاه دوسویه بوده و در برخی دستگاهها از حسگرهایی برای تشخیص و اندازهگیری فشار وارد شده توسط انگشت کاربر بر صفحهنمایش یا دکمههای فیزیکی استفاده میشود. یک نمونه متداول از بازخورد لمسی، لرزشهای خفیفی است که هنگام لمس دکمههای مجازی روی صفحهنمایش گوشیها ایجاد میشود تا کاربر به واسطه حس لامسه از فشرده شدن دکمهها اطلاع پیدا کند. همانطور که چشم شما متوجه تغییر محتوای صفحهنمایش یا ظاهر شدن چند آیکون روی تصویر شده، مغز شما میداند که قصد انتخاب یک آیکون و فشردن یک دکمه را دارید، انگشت شما نیز نیاز دارد که لمس آن دکمه را احساس نماید. لرزش گوشی هنگام دریافت پیامها و تماسها، نمونههایی دیرینهتر از کاربرد haptics در دستگاههای همراه هستند.

امروزه اکثر افراد از طریق گوشیهای هوشمند با بازخورد لمسی آشنا میشوند. در صورتیکه این یک فناوری جدید نبوده و قدمت آن به سالها پیش از پیدایش گوشیهای هوشمند برمیگردد. یکی از اولین زمینههای کاربرد این فناوری در ساخت سیستمهای کنترل هواپیماهای بزرگ بود و از اواخر دهه 90 میلادی نیز تولیدکنندگان کنسولهای بازی به استفاده از موتورهای لرزشی در دستههای کنترل بازیهای ویدئویی روی آوردند. از آن زمان تا سالها بعد، بیشترین دستگاههای الکترونیکی مجهز به بازخورد لمسی، همین دستههای بازی بودند. با پیدایش و گسترش استفاده از تلفنهای همراه، این فناوری به سرعت در این دستگاهها نیز به کار گرفته شد. تا جایی که امروزه بازار دستگاههای همراه به عنوان مهمترین بستر استفاده از این فناوری شناخته میشود. اگرچه در دهههای اخیر، شاهد استفاده از فناوری بازخورد لمسی در صنایع مختلفی از جمله رباتیک، هوا-فضا، پزشکی و خودرویی نیز هستیم.

فناوریهای ایجاد بازخورد لمسی
موتورهای لرزشی (vibration motors): اغلب تجهیزات الکترونیکی امروزی برای ایجاد بازخورد لمسی از "موتورهای لرزشی" استفاده مینمایند. این موتورها از طریق ایجاد لرزش با قدرت، فرکانس و ریتمهای متفاوت، اطلاعات مختلفی را از طریق حس لامسه به کاربر منتقل میکنند. یکی از پرکاربردترین انواع موتورهای لرزشی که در بسیاری از دستگاههای الکترونیکی به کار میرود، عبارت است از موتور محرکه ERM که از یک وزنه نامتقارن که به محور یک موتور متصل گردیده، تشکیل یافته است. با روشن شدن موتور، این جرم نامتقارن به چرخش درآمده و موجب ایجاد لرزش در دستگاهی که به آن متصل است میشود. انواع دیگری از موتورهای لرزشی نیز وجود دارند که از مهمترین آنها میتوان به موتورهای لرزشی سکهای، موتورهای LRA و محرکهای فیزوالکتریک اشاره نمود.
بازخورد نیرو (force feedback): فناوری مهم دیگری که برای ایجاد بازخورد لمسی توسعه یافته و در برخی دستگاهها مورد استفاده قرار میگیرد، به اصطلاح بازخورد نیرو (force feedback) یا کوبش شتابدار (accelerated ram) نامیده میشود. در این فناوری سعی میشود تا با استفاده از موتورهایی خاص، حرکت دستگاهی که در دست کاربر قرار دارد، تحت تاثیر قرار داده شود. یکی از کاربردهای معمول این فناوری در شبیهسازها و بازیهای ویدئویی رانندگی، خلق احساس مقاومت و نیروی وارد به فرمان خودرو در سر پیچها، یا حس ضربه و فشار وارد به آن در دستاندازها و هنگام پرشها است. از دیگر کاربردهای چنین موتورهایی میتوان به شبیهسازی حس لگد اسلحه، اصابت گلوله و دیگر اجسام به شخص، یا فشارها و ضربات وارد شده به خلبانها اشاره نمود. ضربات و نیروهای لازم برای این شبیهسازیها به طور معمول با استفاده از چکشهای مغناطیسی ایجاد میشوند. برخی شرکتهای فعال در زمینه توسعه و ساخت تجهیزات مبتنی بر این نوع بازخورد لمسی عبارتند از Novint و TacHammer.

حلقههای گردابی هوا (air vortex rings): حلقههای گردابی هوا عبارتند از بستههایی متشکل از هوای فشرده شده که میتوانند از فواصل دور (حتی تا چند متر) به سطوح مختلفی از جمله دست و بدن انسان نیرو وارد کنند. پروژه تحقیقاتی مایکروسافت به نام AirWave و همچین برنامه تحقیقاتی دیزنی با نام AIREAL از جمله مهمترین مواردی هستند که از گردابهای هوا برای ایجاد بازخورد لمسی بدون تماس بهره گرفتهاند.
امواج فراصوت (ultrasound): امواج متمرکزشده فراصوت نیز میتوانند برای خلق حس فشار روی سطح انگشت، بدون نیاز به لمس اجسام فیزیکی به کار گرفته شوند. به کمک مجموعهای از مبدلهای فراصوت میتوان فشار، لرزش و حتی حس لمس اشیای مجازی سهبعدی را برای کاربران ایجاد نمود.
انواع موتورهای لرزشی
در اغلب کاربردهای امروزی همچون دستگاههای همراه و دستههای بازی ویدئویی، برای ایجاد بازخورد لمسی از موتورهای لرزشی استفاده میشود. درست مانند یک چراغ چشمکزن یا یک اعلان صوتی، لرزش نیز یک راه موثر برای اعلام وقوع یک رویداد یا ثبت یک فرمان است. طی دهههای گذشته انواع مختلفی از موتورهای لرزشی توسعه یافته و در دستگاههای الکترونیکی به کار رفتهاند که در ادامه به بررسی مهمترین آنها خواهیم پرداخت.
موتورهای ERM سیلندری
موتورهای ERM -- مخفف Eccentric Rotating Mass یا جرم چرخان مختلفالمرکز – به زبان ساده موتورهایی هستند که با چرخاندن یک جرم فلزی به دور یک محور ثابت، ایجاد لرزش مینمایند. جرم فلزی در چنین موتورهایی سیلندریشکل بوده و به گونهای طراحی میشود تا مرکز ثقل آن با محور چرخش موتور فاصله داشته باشد. بدین ترتیب چرخش سریع این جرم سیلندری حول محوری که نسبت به آن حالت نامتقارن دارد، موجب جابجایی مکرر موتور و ایجاد لرزش میشود. حال چنانچه این موتور به بورد یا بدنه یک دستگاه که در دست کاربر قرار دارد متصل باشد، لرزش ایجاد شده به بدنه دستگاه و سپس دستان کاربر منتقل خواهد گردید.
این موتورهای سیلندری متداولترین و پرکاربردترین انواع موتورهای لرزشی در دو دهه اخیر به شمار میروند. این نوع موتورها نسبت به دیگر انواع موتورهای لرزشی ارزانتر بوده و در عین حال قدرت لرزش بالایی دارند. همین مزایا موجب استفاده گسترده از آنها در بسیاری دستگاههای الکتریکی و الکترونیکی همچون دستههای بازی کنسولهای خانگی شده است. از جمله معایب اصلی آنها نیز میتوان به اندازه بزرگ، مصرف انرژی بالا و زمختی لرزشها اشاره نمود. به دلیل همین معایب امروزه بسیاری از تولیدکنندگان دستگاههای الکترونیکی در حال روی آوردن به دیگر انواع موتورهای لرزشی هستند.
موتورهای لرزشی سکهای
یکی دیگر از انواع موتورهای لرزشی که به طور معمول در دستگاههای کوچکتر مورد استفاده قرار میگیرند، موتورهای لرزشی سکهای یا Coin Vibraion Motors نام دارند. این نوع موتورها که از منطق و مکانیزمی مشابه موتورهای سیلندری پیروی مینمایند، اندازهای به مراتب کوچکتر داشته و شکلی شبیه به سکه یا پَنکِیک دارند. در واقع این موتورها نیز با چرخاندن یک جرم مختلفالمرکز، ایجاد لرزش میکنند. اما بر خلاف نوع قبلی، محور چرخش موتور بسیار کوتاهتر بوده و جرم مختلفالمرکز بسیار کوچکتر است. همچنین این جرم چرخان حالت تخت و سکهایشکل داشته و به جای اینکه آزاد باشد، درون یک محفظه محصور است. به همین دلیل، این نوع موتورهای لرزشی به نام موتورهای سکهای یا پنکیکی شهرت یافتهاند. اگرچه میتوان موتورهای سکهای را از نظر مکانیزم کاری در رده موتورهای ERM به شمار آورد، اما به طور معمول در فضای صنعتی موتورهای لرزشی سیلندری با عنوان موتورهای ERM و این موتورهای سکهایشکل با عنوان موتورهای لرزشی سکهای یا پنکیکی مورد اطلاق قرار میگیرند.

مزیت اصلی این نوع موتورها نسبت به انواع سیلندری، اندازه کوچک و حالت فشرده آنهاست. همین خصوصیت موجب گردیده است که جایگیری و نصب آنها در دستگاههای کوچکتر به مراتب راحتتر باشد. در مقابل، شدت لرزشهای ایجاد شده توسط این نوع موتورها تا حدودی نسبت به موتورهای سیلندری کمتر است. خصوصیات ویژه موتورهای لرزشی سکهای، آنها را به گزینهای مناسب برای استفاده در ابزارهای پوشیدنی هوشمند مانند دستبندهای تناسب اندام و ساعتهای هوشمند بدل ساخته است.
موتورهای LRA
یکی از فناوریهای جدیدتر و پیشرفتهتر در زمینه ایجاد بازخورد لمسی، موتورهای محرکه طنین خطی یا LRA (مخفف Linear Resonant Actuator) است. برخلاف نوع ERM که از یک مکانیزم چرخشی بهره میگیرد، عملکرد این نوع موتورها بر مبنای نوسان خطی استوار است. بدین ترتیب که یک جرم آهنربایی کوچک به یک فنر متصل گردیده و با کمک نیروی الکترومغناطیسی در یک مسیر خطی به سرعت جلو و عقب برده میشود. این تغییر مکرر در جهت حرکت جرم نوسانکننده موجب ایجاد لرزش در دستگاه مورد نظر میگردد. موتورهای LRA نسبت به انواع مبتنی بر مکانیزم ERM مصرف انرژی کمتری داشته و قادرند لرزشهای دقیقتر و پیچیدهتری را تولید نمایند. علاوه بر این، موتورهای LRA سرعت پاسخگویی بالاتری نیز داشته و به همین دلیل در ایجاد بازخورد لمسی هنگام فشرده شدن سریع کلیدهای کیبورد و تایپ متن توسط کاربران دستگاههای همراه به مراتب بهتر از موتورهای ERM عمل میکنند. از مهمترین معایب این نوع موتورها میتوان به قیمت بالاتر و پیچیدگی بیشتر در بهکارگیری آنها توسط تولیدکنندگان اشاره نمود.

کیفیت بالای بازخورد لمسی ایجاد شده توسط موتورهای LRA در کنار مصرف انرژی بسیار بهینه آنها موجب گردیده است تا استفاده از آنها در میان تولیدکنندگان دستگاههای همراه ردهبالا رواج پیدا کند. اپل به عنوان یکی از شرکتهای پیشرو در بهکارگیری این فناوری، موتور LRA اختصاصی خود را توسعه داده و آن را در سال 2015 میلادی با نام Apple Taptic Engine معرفی نمود. این موتور به گونهای طراحی شده است تا حس کلیک کردن و فشردن کلیدهای فیزیکی کیبورد را به طبیعیترین شکل ممکن برای کاربران شبیهسازی نماید. موتور بازخورد لمسی اپل که در بسیاری از دستگاههای این شرکت از جمله آیفون، Apple Watch و MacBook به کار میرود، یکی از گرانقیمتترین و پیچیدهترین موتورهای LRA به کار رفته در دستگاههای هوشمند است. شرکت سامسونگ نیز از سال گذشته میلادی برای ایجاد بازخورد لمسی در برخی گوشیهای هوشمند ردهبالای خود به استفاده از موتورهای LRA روی آورده است. دستگاههایی همچون گلکسی Note10 Plus، گلکسی S20 Plus، گلکسی S20 Ultra و همچنین گلکسی Note20 Ultra از این نوع موتورهای بازخورد لمسی بهره میبرند. علاوه بر اینها، در ساخت کنسول بازی Nintendo Switch و دسته بازی Steam نیز از همین نوع موتورهای لرزشی استفاده شده است.
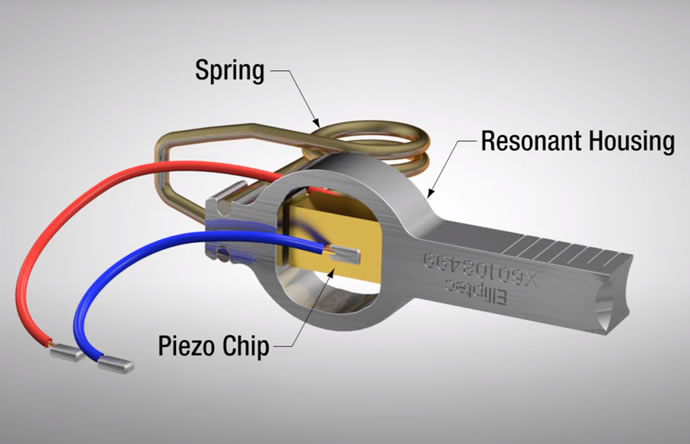
موتورهای محرک پیزوالکتریک
موتورهای محرک پیزوالکتریک از نوعی ماده سرامیکی ساخته میشوند که با دریافت شارژ الکتریکی منبسط و منقبض شده و از این طریق موجب ایجاد حرکت و نیرو میگردد. در واقع هنگامی که ولتاژ متغیر به دو طرف یک محرک فیزو اعمال میشود، این ماده سرامیکی به سرعت خمیده شده و ایجاد لرزش مینماید. این نوع موتورهای لرزشی قادرند در فرکانسها و دامنههای نوسان وسیعی به لرزش درآمده و به طور مستقل با استفاده از ولتاژ محرک AC کنترل شوند. همین خصوصیت موجب میشود تا موتورهای پیزوالکتریک نسبت به موتورهای ERM و LRA از دقت بالاتری برخوردار باشند. از آنجا که لرزش ایجاد شده در این موتورها وابستگی به فرکانس گردش محور موتور یا نوسان یک فنر ندارد، تغییر فرکانس لرزشی این نوع موتورها به راحتی و بدون اتلاف قابل توجه انرژی قابل انجام است. البته این نوع موتورها به ولتاژ بالاتری برای کار نیاز داشته و در نتیجه مصرف انرژی بیشتری دارند. از جمله دیگر معایب مهم موتورهای محرک پیزوالکتریک نسبت به دیگر موتورهای لرزشی میتوان به قیمت بالا و طبیعت شکننده مواد سازنده آنها اشاره نمود. همین مساله موجب شده است تا با وجود قدرت و دقت بالای این نوع موتورها، استفاده از آنها در دستگاههای همراه گسترش چندانی پیدا نکند.
بازخورد لمسی در گوشیهای هوشمند
صفحهنمایش هر دستگاه همراه از نظر فیزیکی و در شرایط عادی یک تکه شیشه یا پلاستیک سخت است که وقتی شما انگشت خود را روی آن میفشارید، نه خمیده شده و نه فرو میرود. بنابراین هنگام فشردن یک آیکون یا تایپ متن روی صفحهنمایش، انگشتان شما در واقع به یک سطح سخت برخورد مینمایند. بنابراین چنانچه هنگام لمس صفحهنمایش بازخوردی صوتی، بصری یا لمسی از سوی دستگاه دریافت ننمایید، هیچ حسی از تعامل با دستگاه به شما منتقل نشده و حتی ممکن است شک کنید که آیا محل صحیح را لمس نمودهاید یا اینکه آیا دستگاه فرمان شما را دریافت نموده است یا خیر. طبیعیترین نوع بازخوردی که دستگاه میتواند در چنین مواقعی به شما منتقل نماید، همان بازخورد لمسی یا Haptic Feedback است. بازخوردی که تلاش میکند تا حد امکان حسی مشابه لمس و فشردن واقعی یک کلید را شبیهسازی نماید.
اگرچه کیفیت بازخورد لمسی کمتر مورد توجه عموم کاربران قرار میگیرد، اما پیادهسازی خوب یا بد آن میتواند تاثیر بهسزایی بر تجربه کاربری گوشیهای هوشمند داشته باشد. برای فراهمسازی بازخورد لمسی در گوشیهای هوشمند، انتخاب موتور مناسب از اهمیت زیادی برخوردار است. برای برخی دستگاهها یک موتور قوی مناسب بوده و برای برخی دیگر ممکن است موتورهای ضعیفتر انتخاب بهتری باشند. مساله این است که موتور انتخاب شده به اندازه کافی قدرتمند و به اندازه کافی سریع باشد تا در زمان مناسب و با قدرتی مطلوب نسبت به فرمانهای وارده توسط انگشت شما واکنش نشان داده و حسی مطلوب از بازخورد لمسی را برایتان تداعی نمایند. درحالیکه ایجاد لرزش یا ویبره برای یک تماس ورودی یا پیام دریافتی میتواند بسیار ساده باشد، اما ایجاد بازخوردهای لمسی خوب و بهموقع هنگامیکه با سرعت تمام مشغول تایپ روی اپلیکیشن کیبورد هستید، کار چندان راحتی نیست. نحوه جایگذاری و انتخاب محل مناسب برای قرارگیری موتور لرزشی نیز به میزان قابل توجهی بر کیفیت بازخورد لمسی اثرگذار است. احتمالا همه ما تجربه کار با گوشیهایی را داشتهایم که از یک موتور لرزشی قدرتمند برخوردار بوده و محل قرارگیری این موتور بیش از حد به دو انتهای بالا یا پایین دستگاه متمایل بوده است. در این حالت حسی غیرطبیعی و ناخوشایند از تکان خوردن قسمت بالا یا پایین گوشی به دست منتقل میشود. بنابراین لازم است که موتور لرزشی به کار رفته در یک گوشی هوشمند از قدرتی متناسب و سرعتی بالا برخوردار بوده و همچنین در محل مناسبی قرار گرفته باشد تا در هنگام لرزش، حس مطلوب و متوازنی از بازخورد لمسی را در دستان شما ایجاد نماید.
اما در فراهمسازی بازخورد لمسی همه چیز به موتور ختم نمیشود. بلکه انتخاب موتور و تعبیه آن در محل مناسب، تازه شروع کار است. شاید مهمترین مساله برای تولیدکنندگان دستگاههای همراه در ایجاد بازخورد لمسی، جنبه نرمافزاری آن باشد. اینکه موتور چه زمان بایستی روشن شده، با چه فرکانسی لرزش نموده و چهقدر روشن بماند، همگی از اهمیت بسیار بالایی برخوردار هستند. این موارد اگرچه ساده به نظر میرسند، اما انجام و تنظیم صحیح آنها در عمل بسیار پیچیده است. از آنجا که تنظیم زمان روشن و خاموش شدن موتور لرزشی بایستی در مقیاس میلیثانیه با دقتی بالا انجام شود، تقریبا جایی برای خطا و تاخیر وجود ندارد. به عنوان مثال برای ایجاد بازخورد لمسی هنگام فشرده شدن یک کلید روی صفحهنمایش، لازم است که به محض برخورد انگشت ما به صفحه، موتور شروع به کار کرده و با برداشته شدن انگشت یا پس از ایجاد لرزش مناسب برای شبیهسازی حس لمس کلیدهای واقعی، موتور لرزشی متوقف شود. تنظیم صحیح همه اینها به ویژه زمان از کار ایستادن موتور، نیازمند تستهای فراوان و بهینهسازی مختلف در سطح نرمافزار است. زمانی را در نظر بگیرید که مشغول تایپ سریع یک پیام با استفاده از کیبورد نرمافزاری گوشی هوشمند خود هستید. برای ایجاد بازخورد لمسی مناسب، موتور لرزشی دستگاه بایستی با لمس هر کلید توسط شما روشن شده و در عین حال به موقع خاموش شود تا بتواند برای ایجاد بازخورد لمسی مربوط به لمس دکمه بعدی، بار دیگر به لرزش درآید. حال چنانچه این لرزشها به موقع انجام نشوند، نه تنها کمکی به بهبود تجربه کاربری شما نخواهند کرد، بلکه ممکن است به سردرگمی و برهمخوردن تمرکز شما بیانجامند.

بنابراین ایجاد بازخورد لمسی خوب و باکیفیت به هیچ وجه کار سادهای نبوده و گاه تیمهای مختلفی از متخصصین در بخشهای طراحی گوشی هوشمند و توسعه سیستمعامل دست به دست هم میدهند تا به این مهم تحقق بخشند. شرکت اپل در سالهای اخیر توجه ویژهای به این موضوع داشته و به خصوص از زمان معرفی و بهکارگیری Apple Taptic Engine، شاهد خلق بازخوردهای لمسی بسیار خوبی در گوشیهای هوشمند این شرکت بودهایم. شاید یکی از مهمترین دلایل این موفقیت، کنترل و تسلط کامل این شرکت بر هر دو بُعد سختافزاری و نرمافزاری محصولاتش است. اما در گوشیهای هوشمند مبنی بر اندروید، قضیه تا حدودی متفاوت است. طراحی و پیادهسازی ابعاد مختلف بازخورد لمسی در این محصولات از پیچیدگی بیشتری برخوردار بوده و به همین دلیل اغلب با کیفیت چندان بالایی به نتیجه نمیرسد. سیستمعامل اندروید که توسط شرکت گوگل توسعه یافته، از بازخورد لمسی پشتیبانی مینماید. اما این شرکتِ سازنده گوشی هوشمند است که مسئولیت تامین موتور لرزشی، کیت مدار کنترلکننده موتور و نرمافزار مربوط به آن را بر عهده دارد. در سالهای اخیر سامسونگ و وانپلاس از جمله تولیدکنندگان گوشیهای هوشمند اندرویدی هستند که تجربه بازخورد لمسی نسبتا خوبی را برای کاربران محصولات ردهبالای خود رقم زدهاند. گوگل هم اگرچه به طور معمول از موتورهای لرزشی قدرتمندی در گوشیهای پیکسل استفاده نمینماید، اما با عملکرد بسیار خوب در سطح نرمافزار توانسته است بازخوردهای لمسی بهموقع و قابل قبولی را فراهم نماید.
آینده بازخورد لمسی
با پیشرفت و گسترش بازیهای ویدئویی، گوشیهای هوشمند، پوشیدنیهای هوشمند، اینترنت اشیا و واقعیت مجازی، راهی جز گسترش و ارتقای بازخورد لمسی به عنوان یکی از اجزای اساسی ایجاد ارتباط حسی میان انسان و دستگاههای هوشمند پیش رو نخواهد بود. انتظار میرود که در آیندهای نه چندان دور بتوانیم ناهمواریها و بافتها را روی صفحهنمایش دستگاههای همراه حس کنیم. به عنوان مثال با پیشرفت فناوری بازخورد لمسی قادر خواهیم بود تا جنس پارچه پیراهنی که قصد خرید آن را داریم، روی اپلیکیشن یا وبسایت فروشگاههای اینترنتی لمس نماییم. یا هنگام فشردن یک کلید روی صفحهنمایش، تجربهای مانند لمس و فشردن یک کلید فیزیکی را داشته باشیم.
به طور خاص در دنیای دستگاههای همراه، از آنجا که امروزه اغلب محصولات ردهبالا از موتورهای LRA بهره میگیرند، زمان آن فرا رسیده است تا تولیدکنندگان برای ایجاد تمایز و برتری بین دستگاههای پرچمدار خود با رقبا به سراغ فناوریهای جدیدتر و بهتری در زمینه بازخورد لمسی بروند. در نتیجه موتورهای محرک پیزوالکتریک به عنوان یک فناوری جدید در این عرصه با قابلیت ایجاد بازخوردهای قدرتمندتر، دقیقتر و سریعتر، میتوانند آینده بازخورد لمسی را (حداقل برای یک دهه) در دستگاههای همراه رقم بزنند.
خواندنی های دیگر...




تبلیغات

-
 معرفی میانردههای +vivo Y300 Pro با باتری 7,300mAh و Y300t با باتری 6,500mAh
معرفی میانردههای +vivo Y300 Pro با باتری 7,300mAh و Y300t با باتری 6,500mAh
-
 معرفی Redmi 13X ارزانقیمت شیائومی با صفحهنمایش 90 هرتزی، دوربین 108MP و پردازنده Helio G91
معرفی Redmi 13X ارزانقیمت شیائومی با صفحهنمایش 90 هرتزی، دوربین 108MP و پردازنده Helio G91
-
 معرفی Realme 14 5G با Snapdragon 6 Gen 4، بدنه IP69 و باتری 6,000mAh
معرفی Realme 14 5G با Snapdragon 6 Gen 4، بدنه IP69 و باتری 6,000mAh
-
 معرفی پایینرده ارزانقیمت vivo Y39 5G با پردازنده 4 نانومتری و باتری 6,500mAh
معرفی پایینرده ارزانقیمت vivo Y39 5G با پردازنده 4 نانومتری و باتری 6,500mAh
-
 معرفی Poco F7 Ultra اولین اولترای پوکو با Snapdragon 8 Elite، اثر انگشت اولتراسونیک و دوربین پریسکوپی
معرفی Poco F7 Ultra اولین اولترای پوکو با Snapdragon 8 Elite، اثر انگشت اولتراسونیک و دوربین پریسکوپی
-
 معرفی Poco F7 Pro با Snapdragon 8 Gen 3، فریم آلومینیومی، استاندارد IP68 و باتری 6,000mAh
معرفی Poco F7 Pro با Snapdragon 8 Gen 3، فریم آلومینیومی، استاندارد IP68 و باتری 6,000mAh
-
 سامسونگ Galaxy A56 در نگاه رسانهها – نقاط ضعف و قوت از دید حرفهایها
سامسونگ Galaxy A56 در نگاه رسانهها – نقاط ضعف و قوت از دید حرفهایها







